QR2408
NOOBS (New Out of Box Software) を使って Raspbian をインストールする方法を紹介する。
NOOBS とは?
NOOBS(New Out of Box Software) を利用することで1枚のSDカードで複数の OS をインストールし、利用することができる。
NOOBS のインストール
(1) SD カードの準備
SDカードをフォーマットし、NOOBS のファイルをコピーする。
(NOOBS の場合、ファイルのコピーだけなので OS イメージの書き込みに dd などのツールは不要です。)
SDカードのフォーマット
・Mac OS X の場合
SDカードをマウント後に、ディスクユーティリティで「MS-DOS(FAT)」フォーマットでSDカードを消去する。
・Mac OS X 以外の場合
以下の URL を参考にSDカードをフォーマットする。
https://github.com/raspberrypi/noobs/blob/master/README.md#how-to-format-an-sd-card-as-fat
NOOBS ダウンロード
以下の URL から NOOBS の zip ファイルをダウンロードする。
今回は NOOBS (offline and network install) を選択した。
http://www.raspberrypi.org/downloads
SDカードの準備
ダウンロードした NOOBS の zip ファイルを展開して、展開したファイルをSDカードにコピーする。
(2) OS インストール
Raspberry Pi の電源を入れる前に、本体に SD カードを挿し、LAN ケーブル、HDMI ケーブルとディスプレイを接続する。次に、USB キーボード、マウスを接続し、最後に電源ケーブルを接続して起動する。
起動後に OS の選択画面が表示される。ここでは Raspbian を選択し、インストールする。
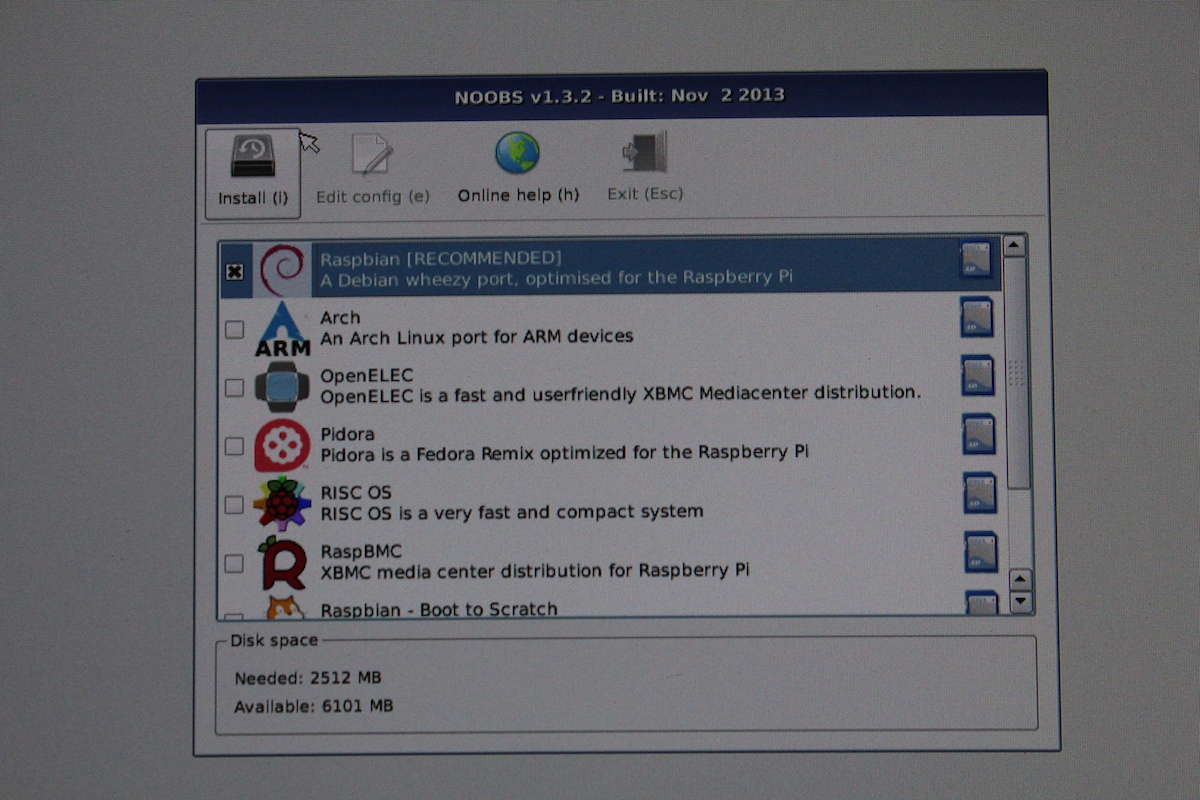
NOOBS: OS 選択画面
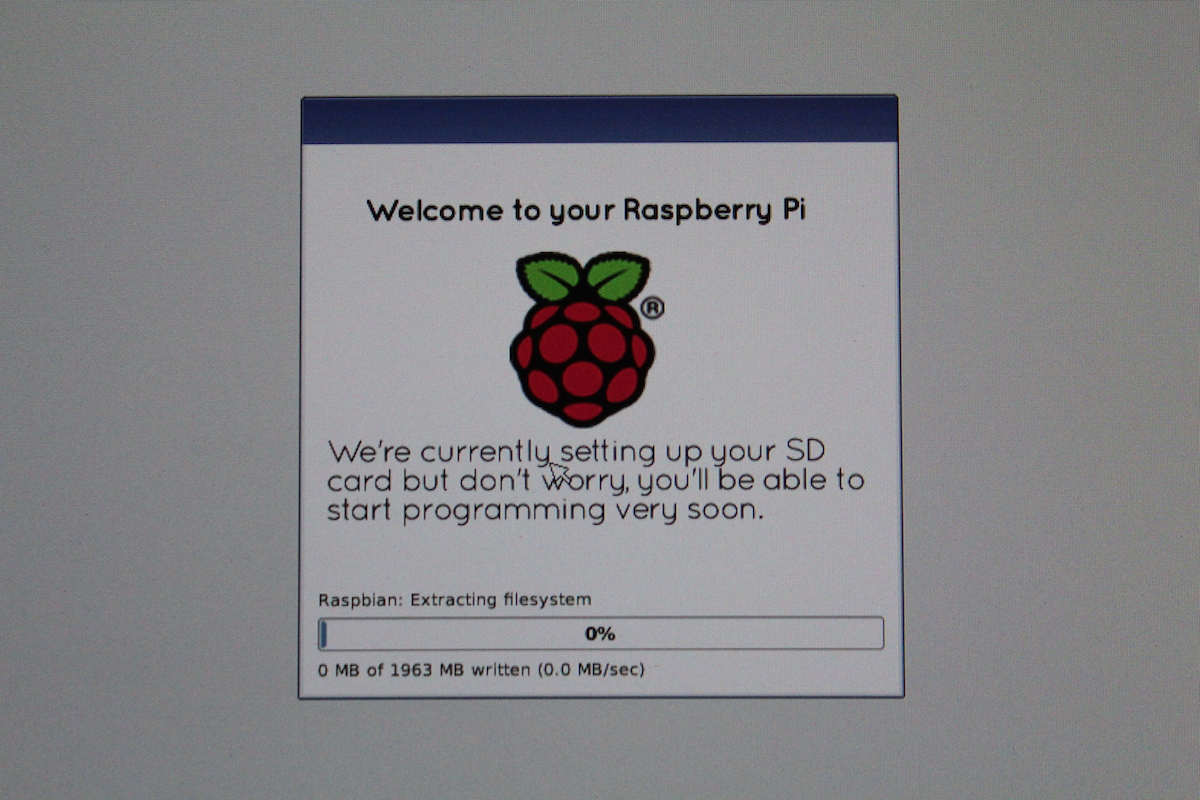
NOOBS: Raspbian インストール
(3) Raspbian の起動
OS インストールが完了すると、Raspbian が起動する。
Raspbian が起動後は通常のインストールと同様に初期設定や各種設定を行う。
(4) NOOBS の起動
別の OS をインストールするには、OS 起動時に [Shift] キーを押下で NOOBS を起動する。